随着准L3级自动驾驶开始规模化量产,自动驾驶的落地正式进入到竞速期,中国作为全球几个主要的汽车市场之一,包括腾讯、百度以及一系列车企都加入了自动驾驶的行列,短短几年时间,国内自动驾驶平均水平已经相当之高。近日,如祺出行联合全球顶级咨询公司罗兰贝格发布《自动驾驶出租车(Robotaxi)商业化前景展望》白皮书,白皮书认为,中国自动驾驶出租车(以下简称 Robotaxi)市场已处于全球领先地位,北上广深等一线城市在Robotaxi 的商业化探索上走在前列,在不断快速发展的同时,涌现出了多种商业模式成为自动驾驶技术落地的核心场景。
百度作为国内最先拥抱自动驾驶行业的企业之一,2013年就在世界互联网大会乌镇峰会上展示了自己改造的首辆自动驾驶汽车,2015年,百度用一台宝马3系改装车完成了国内无人车首秀,并且从北京新高速到五环进行了最高速度达100公里/小时的自动驾驶演示,百度智能驾驶事业群组(IDG)首席研发架构师,IDG技术委员会主席王亮博士曾言,“这是百度自动驾驶第一个里程碑事件,在当时代表着最强的自动驾驶能力”。如今国内自动驾驶进入竞争更为激烈的下半场,Argo AI 、 Ibeo等老牌企业相继破产,“活下来”成为战场主旋律。11月29日,百度Apollo Day正式举办,百度也证明了自己拥有在自动驾驶行业角逐胜利的信心与底气。
安全是核心
随着萝卜快跑项目的落地,也代表着百度Apollo已经跨越了自动驾驶商用的这道坎,但随着自动驾驶大规模商用开始,更高的要求与更多的需求接踵而至,首当其冲的就是安全。在这次Apollo Day上百度自动驾驶首席架构师陈竞凯详细介绍了百度Apollo如何确保自动驾驶的安全。
不同于其他品牌,百度Apollo安全性最大的优势就在故障处理策略上,自动驾驶过程中总会遇到各种不同的场景,通过对仿真系统的完善,百度Apollo不仅具备即时处理安全问题的能力,还能不断对其进行云端调整,这种调整是百度Apollo通过把"不确定因素"放入云端,仿真系统对其进行模拟判断,判断标准有两个——“知道不知道”与“安全不安全”,在云端不断模拟之下,当路上遇到相同情况的时候,这些模拟场景均会被调用,这种体系之下,安全会随着商业化不断扩大而加强。

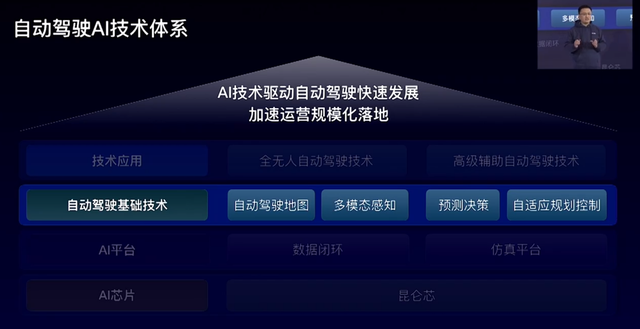
陈竞凯同时还介绍了百度的自动驾驶基础技术,包括自动驾驶地图、多模态感知、预测决策、自适应规划控制等四个方面,而这四方面也是今天Apollo Day的所有主要内容,也是构成百度自动驾驶技术的基石。
高精地图依然是关键
从标准地图到现在的自动驾驶地图,百度这些年在地图上的实力毋庸置疑,特别是现在的自动驾驶高精地图,Apollo Day上黄际洲称其具备相当大的行业壁垒。首当其中就是资质,不是随便找一家企业就能拿到相关资质;其次制作自动驾驶高精地图需要的研发周期长、成本高昂,不是一般的企业能够承受的;最后现阶段这部分地图几乎没有市场需求,这导致短期内谈不上商业回报。也正是因为这些困难,百度目前是国内唯一一家拥有高精地图并且深耕自动驾驶的企业。
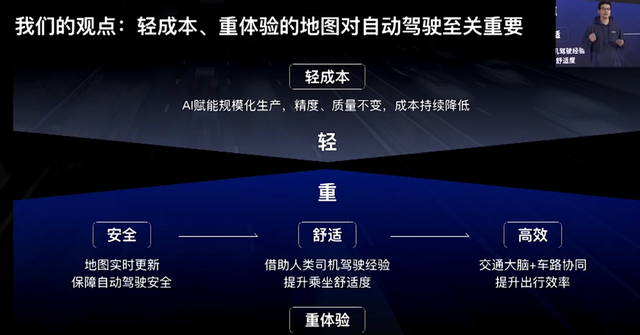
百度Apollo的自动驾驶地图要完成“轻成本,重体验”的目标。在“轻成本”上,百度用自动化数据融合让地图的成本大大降低,这主要是通过对所有地图数据的收集、小块处理并进行几何融合的方式,完成最终自动驾驶地图的形成,百度克服了包括块状地图融合的精度、场景化的关联、重叠部分的融合效率等等难点,最终达成了“轻成本”目标。
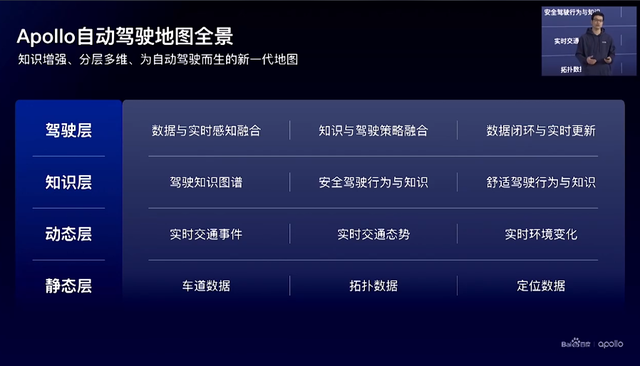
在“重体验”上,百度Apollo主要是针对一些在实际场景中,包括多次变道、突发限速等情况都会让乘客的体验变差,这时候百度提出了“驾驶知识图谱”,即基于百度地图1200万公里的领先路网覆盖范围及海量时空数据,结合数亿司机的驾驶知识沉淀,构建全路网级别的驾驶知识图谱,学习人类司机经验,最终形成更为舒适的自动驾驶体验。
大模型已经成为行业共识
在自动驾驶发展过程中,多传感器的融合是达成目标的必要条件,这其中算法成为了整个系统的核心内容。在之前的“感知1.0”方案中,行业的算法基本比较泛规则化,整体比较死板,比如红绿灯识别就靠视觉方案,环视视觉感知主要依靠激光雷达等等,若出现一些特殊情况(小动物、货车外凸的货物等),往往这种算法就会出现误判,这肯定不符合自动驾驶的要求。
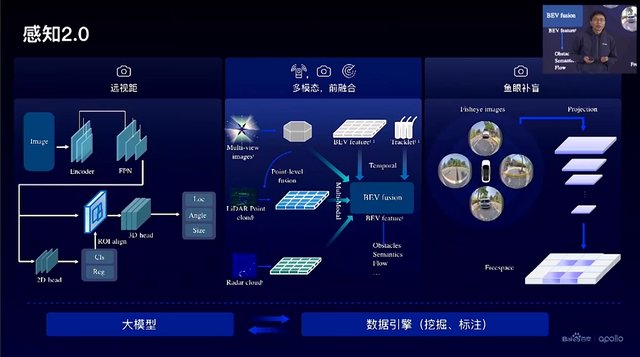
Apollo Day上百度介绍了自己的大模型技术,其能让自动驾驶在短距离、中等距离与远距离都能有不错的表现。大模型算法主要有两个方面的新内容,首先是有关新模型的判定,大模型通过“自训练”的方法,为系统提前建立训练模型,完成对陌生3D模型的伪标注,随着各个大模型的叠加,这种训练会越来越简单,越来越快,自动驾驶算法在实时判断也会更准确。
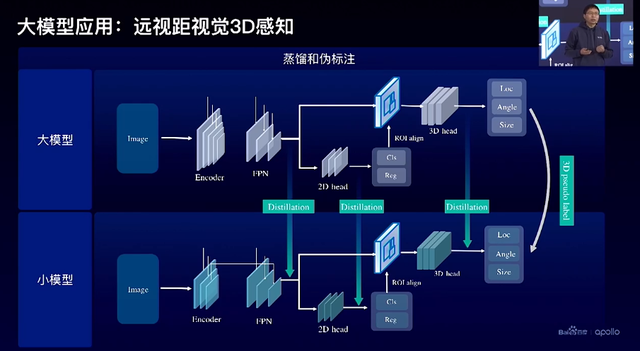
大模型技术还包括了从大模型到小模型的能力。该能力主要通过蒸馏与伪标注的方式,让大模型下沉到小模型,并且在实际场景中大型模来帮助小模型解决自动驾驶中的误判,比如在道路上遇到对向洒水车正在洒水的情况,大模型会判断对向的洒水车,从而帮助车型判断出“洒出的水”这个小模型,减少对“水”的误判情况,大模型技术已经成为自动驾驶提升的核心驱动力。
自动驾驶要面对不断出现的新问题
自动驾驶肯定要面对道路上不断出现的新问题,记录并解决就是数据闭环要做的事情。李昂提出自动驾驶数据不应该仅仅只在乎有多少的量,更多的精力应该放在数据的高度提纯以及数据的消化上。
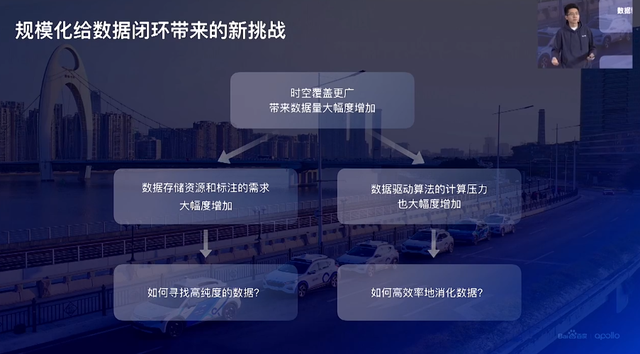
在实际场景中,数据中肯定会包含一些道路上的意外物品(垃圾、动物),百度会对其进行匹配,分辨出其中不确定性元素,留下有价值的信息,实现对该场景更准确的判断,这就是数据提纯的必要性。百度Apollo在汽车端、云端均加入了数据提纯的赋能,最终完成高纯度的数据模型。

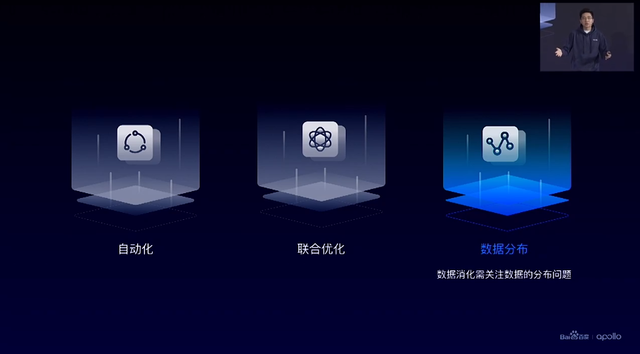
数据样本的剧增削弱了我们将数据转化为价值的能力,数据消化则是对处理数据的速度以及准度提出要求,通过数据自动化、联合优化、以及对数据分布的准确判断,百度Apollo构建起了基于
数据-模型-指标的消化反馈机制,最终形成了自动驾驶数据的闭环,实现了数据、模型和指标的集中式、端到端整合。
百度自研AI芯片越发先进
AI芯片也被称为AI加速器或计算卡,即专门用于处理人工智能应用中的大量计算任务的模块,百度作为国内自动驾驶的领头羊,在Apollo Day上也展出了自研AI芯片——昆仑芯片。昆仑芯片实际上已经推出了两代量产产品,今天要重点介绍的就是昆仑芯二代AI芯片,该芯片也是业界第一颗DDR6高速闪存的AI芯片。
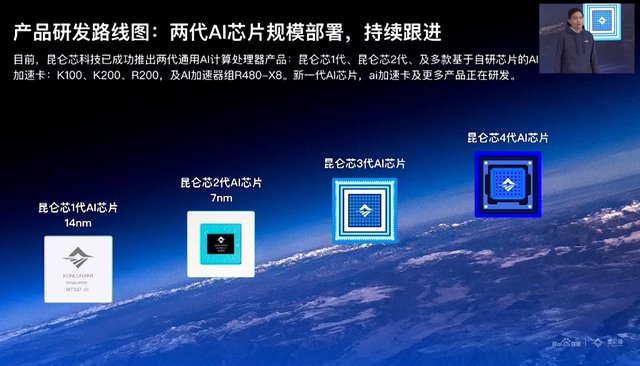
昆仑芯片采用的XPU-R架构,通过7nm先进工艺,能够达到128TFLOPS FP16的强大算力,完全满足自动驾驶的需求,除此之外,昆仑芯二代还拥有32GB的高速闪存以及512GB/s的内存带宽,并且支持虑拟化,芯片间互联和视频编解码,是非常完备的AI芯片。
昆仑芯片对业界来说最大的优势有三点:其一是昆仑二代AI芯片已经在互联网,工业质检、智慧交通智慧金融等场景均有实际部署,也证明了该芯片的可行性;其二是昆仑芯片已与多款通用处理器、操作系统、AI框架完成端到端的适配;其三昆仑芯片专门为开发者提供了全方位的软件工具包,让大家都能更简单的对昆仑芯片系统进行独立个性化的开发与定制。
ANP 3.0“务实领先”
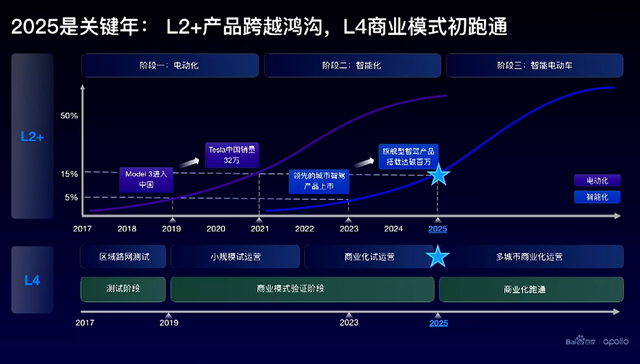
随着国内智能汽车行业的快速发展,我们可以预见大规模自动驾驶普及已经不远了。百度认为随着2023年城市道路辅助驾驶大量装配,国内自动驾驶行业将会向下个阶段进发,到2025年正式跨入新阶段,用户会大量提出接近完全自动驾驶的需求,也就是我们所说的L4自动驾驶,百度ApolloL在这方面在国内更是“务实领先”,推出了ANP 3.0系统。
百度否认了无脑硬件堆料的做法,它们认为不堆料重体验才是自动驾驶正确的路。在硬件上百度选用了包括500+ TOPS AI算力得到Nvidia Drive Orin-X,max视距~400m的环视8MP摄像头、1,536,000 points/s的SOTA半固态激光雷达,在保证体验的基础上,百度的自动驾驶硬件能力同样遥遥领先于行业。

在激光雷达与视觉摄像头方案上,百度选择“两条腿走路”。百度视觉感知方案Apollo Lite是世界唯三、中国唯一支持城市道路的纯视觉,自动驾驶的感知系统;LiDAR则是由百度Apollo十年深耕,算法理解、实践经验和数据储备全面领先,成熟可靠的激光雷达方案。在两种系统的加持下,百度自称是“国内唯一真‘冗余’的环境感知系统”。
Apollo Day最后百度提到了L2-L4的困难,其中包括前期高质量L4数据和长期海量的L2数据的高效处理,而现在百度的ANP 3.0就是让L2/L4+技术共生,提前布局,可以说百度Apollo已经走在了自动驾驶行业的最前列。

推荐

AITO问界M9智能大灯强势来袭 赛力斯汽车闪耀北京车展!
阿川说车
一个更适合年轻人的家,哪吒L售价12.99万元起 惊艳上市!!
阿川说车
创始人昌敬首度登场 ——“越野小房车”极石01亮相北京车展!
阿川说车
传祺新能源发布EV+方案,引领无焦虑、更美好的智电时代!!
阿川说车
京.世未来:北京车展埃安发布第二代AION V将成新爆款
邢车博士
北京车展埃安发布重磅车型 第二代AION V将成新爆款!
阿川说车
安达组合×传祺新能源唱出i-GTEC2.0“真香真科技”!
阿川说车
“悦己大使”张智霖携袁咏仪空降北京车展,共同见证新豪华标杆之作
阿川说车
长安汽车交出北京车展时代答卷,全球首款量产可变新汽车发布
邢车博士
大运集团远航品牌携旗下新能源车型亮相2024北京国际汽车展览会!
阿川说车
个性外观叠加华为智驾,高颜都市性能SUV非属问界新M5
汽车头条
京.世未来:全新捷达VS5/VS7璀璨上市,北京车展启航
邢车博士评论
暂无评论,抢占沙发