FSD来中国,真会卡在电瓶车?不出意外,焕新Model Y会在今年3月上市交付,同时,计划在今年一季度内落地的FSD,可能终于要来了。去年12月初,FSD从第12代系统更新到了V13.2,按照马斯克的说法,新系统的功能和体验和之前完全不同,是效果最强的版本,从海外实测结果来看,从识别准确性到整套执行逻辑,博弈方案确实都比以往更进化,这也直接吊足了中国车主的胃口,那么,这套新系统在中国的智驾能力,大概在什么水平?和国产智驾技术比起来,FSD真的在领先位置上?

不会避让电瓶车,硬件和软件谁出了问题?
关于FSD V13.2的具体效果,之前我们曾分析过,简单说有2个细节做了较大优化,一个是开启条件不再受限,一个是接管率降了10倍左右。就目前国产智驾技术的功能来看,像三点式掉头,无保护左转,绕行、环岛高效通行,城市或高速领航等,新版本的FSD基本也都有,似乎到了中国直接就能上路用,不过,在最近一次的海外实测中,有人发现FSD V13.2遇到中国特有的三轮电瓶车,通行率明显受到影响,SR能识别到障碍物,并且选择主动停车礼让,没完全降级,但需要接管完成人机共驾。

既然出现了corner case,那么在感知、规控、执行的端到端架构里,究竟哪个环节出了问题?首先,FSD作为纯视觉智驾技术,感知架构获取环境数据的途径,只有通过摄像头来完成,目前FSD的构成硬件条件,是HW四代芯片和7颗500万像素摄像头,芯片不用再赘述,7nm制程,20核CPU,内存从LPDDR4升级到GDDR6,单颗算力720TOPS,视频信号转化数据的能力基本不存在难题,双目摄像头最大探测距离424米,比华为最新的192线激光雷达还远了将近一倍,36赫兹全分辨率视频信号输入,就是1秒能反复看36次视频,总数据带宽为每秒1.3千兆像素,以36赫兹运行,捕获和推理之间的数据基本不存在延迟,理论上讲,FSD在2021年放弃激光雷达之后,感知架构端对环境道路的数据处理能力,可以说是能和传统激光雷达做正面对比的。
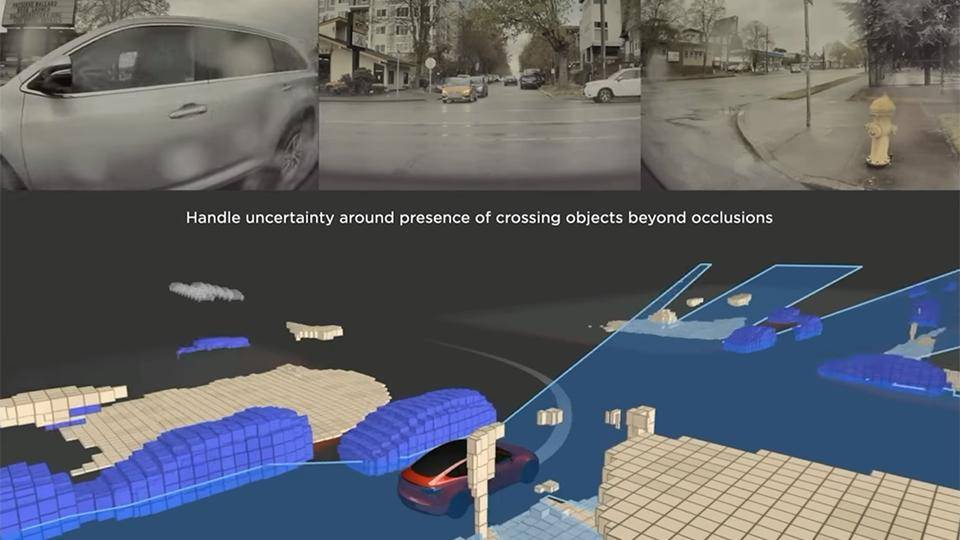
所以,问题还是出在了软件层面上。大家都知道,FSD的感知模块,是基于HydraNets架构搭建的,简单说就是整合了多个视觉识别任务到单一网络上,通过以Transformer为主干网络+BEV感知网络,从而实现对车辆周围环境的感知,这也是目前国内智驾系统的技术底层架构,但区别和核心,就在FSD用了Occupancy占用网络,准确来讲,这是一类结合了语义分割和栅格占据地图法的技术,除了给图像中的每个像素分配给一个3D占用特征,再将环境分多个栅格,并将每个栅格标记为占用或空闲的方法,最终可以对环境进行建模,并在此基础上进行路径规划等操作,听起来比较复杂,但我们划个重点,“3D占用特征”,最直白的话来理解,就是通过感知硬件架构,把世界环境分成无数个单元格,再根据障碍物的形态、体积,给到对应的坐标数据,精度上甚至能做到厘米级,没错,小米正在做的BEV变焦技术,就和它有相当类似的效果,但,不同之处,就在于Occupancy网络是可以不用像激光雷达做实时扫图,或者反复深度学习做障碍物白名单标定,只要系统识别到,就立马能出数据结果,在CNN卷积神经网络的推演下,理论上说有路没路都能开。

但,FSD来中国前,遇到国内特有的电瓶车就罢工,难免产生了3个思考,1、入华后是否还得再教Occupancy学习认识一遍通用型障碍物?2、国内电瓶车保有量超3亿,路况复杂程度更高,整合国内数据后,FSD做到适配上路大概要多久?3、一旦融入国内道路数据,大模型算法岂不是要超过北美版本?目前这三个问题都不好回答,唯一能证明的,只有等Grok 3重推在国内的端到端算法,而在这个过程之前,FSD至少得先拿到实测视频数据才行,而推演后的新规控逻辑,不出意外最快也得超过2年,这似乎也就意味着,老车主花6万4买的这项功能,今年可能至少又要损失一半了。

FSD今年来中国,至少5家车企不怕?
FSD带着6万4的买断价格,来到中国未必是最好用的,但也是享受门槛最高的。今年,国内谁是FSD的最大竞争者,答案也不难找,有城区NOA,有智能泊车,还有越来越低的接管率,甚至还有3万就能买断的满血高阶智驾包,现在看来差不多已经成为基础的智驾核心功能,FSD来了也是一样在做这些,唯独价格更高。从去年开始,包括华为GOD大网,理想如今的E2E+VLM,越来越多的国产智驾方案并入无图纯视觉城区NOA,高线束激光雷达成本降到4位数后,整车价格也有了再将一些的可能,总之,今年的FSD,会在效果和成本上,没国产技术更值。

回到技术本身来说,FSD的transformer+BEV架构,确实是给了现如今国产智驾方案的技术基底,但二者的出发点不同,也是注定了在不同地区的市场场景上,端到端效果有所不同。FSD就是典型的以技术出发的智驾系统,而中国的端到端,纯粹是从体验的维度来做,甚至不惜会加入规则和记忆来优化。

举个例子,前面提到的occ占用网络,让FSD对环境推理的能力更强,而国内交通参与者极为复杂,更强调博弈能力,这不仅仅是在环境推理层面的思考,更多的也是在不影响通勤效率的同时,给安全行车兜底,所以本质上讲,FSD和国内的主流智驾技术,没有强弱之分,只有体验细节优化上的不同,在Grok 3模型结合国内数据之后,那时可能才会分出一波技术先进性。

但还是要讲,华为现在的GOD大网、理想的E2E+VLM,亦或者是蔚来还没推送的NWM,基本都已经有了下一步迭代的目标,也就是说,现在所谓的端到端(分段式),只是把感知和策划放在了一起,极限少数的场景依然得靠规则驱动,而一体式大模型才是今后几年内,整个智驾技术的发展趋势,FSD用occ网络+深度学习,成本在数据采集量和时间问题,虽然能解绑车端算力要求,但真正考验的是背后的超级计算机,在推理效率上的极限,这也是纯视觉智驾的技术立足根本。

激光雷达方案正好相反,对车端算力平台要求更高,而更高的算力,也意味着更容易处理复杂的场景,更何况,利用3D实时扫图的特性给安全性兜底,一直都是国产技术的共识,所以能和FSD对抗的车企,至少会有华为鸿蒙智行下的四界、小米、理想、蔚来,以及拥抱国产智驾方案的奔驰、宝马、丰田和本田。

推荐

国内不到14万,欧洲超33万,马自达EZ-6打响合资新能源海外第一枪
Car路里40万用户的信赖见证——长安Lumin大回馈首批10台新车惊喜送达
环球汽车网
岚图:破浪前行,在竞争中铸就未来
汽湃
亮出王牌!郑州日产全球多元越野平台很硬核
车域无疆
最辉煌的时刻已经过去?奔驰2024销量解读
UCAR汽车网站
2024车市销量出炉,自主与合资的差距有多大?
My车轱辘
跑了17万多公里电池仅衰退 5%,特斯拉有这么强?
UCAR汽车网站
2万欧元,雷诺Twingo电动版公布内饰
UCAR汽车网站
现代电动车找来土屋圭市,结果推出了这款车
UCAR汽车网站
长安Lumin大回馈,首批10台新车惊喜送达
买车家
全新本田雅阁实车亮相,早已经不是看脸的年纪
车动态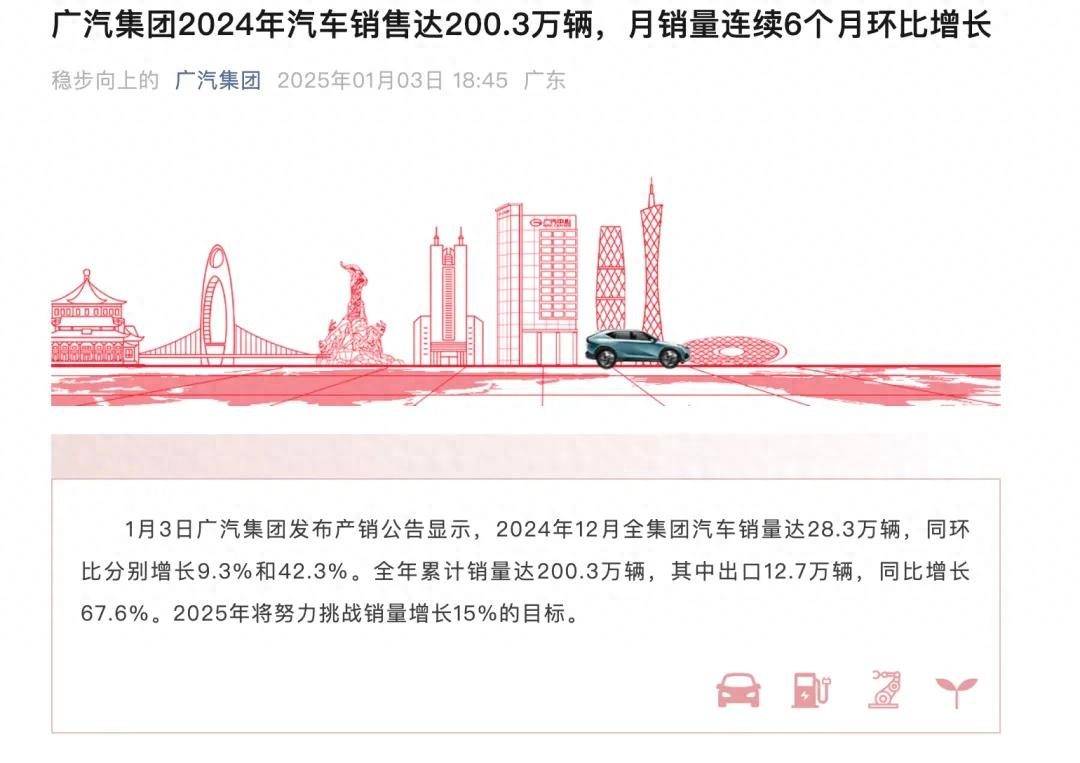
广汽集团年销200.31万辆,2025年剑指新目标
My车轱辘评论
暂无评论,抢占沙发