

通往自动驾驶的第三条路径。
文丨智驾网 王欣
编辑 | 雨来
在刚刚结束的2025 CES上,Mobileye是展台最大、关注度最高的智能驾驶公司,在其重点展示Mobileye SuperVision、Chauffeur和 Drive三大核心智驾平台的同时,还带来了一颗4D成像雷达和最新一代面向完全无人驾驶的EyeQ6H芯片。
Mobileye规划了清晰的技术路线图,再次展示了作为全球自动驾驶领域领军企业的勃勃雄心:只有通过高精确度、高召回率和低成本的技术创新,才能真正实现出行领域的革新,迈向一个更加智能、更安全和更高效的未来。
2025年的CES,复合人工智能系统(Compound AI System,简称CAIS)、高效芯片、成像雷达是Mobileye展台的关键词。
01.
基于双路径的最新智驾产品规划
从目前Mobileye在自动驾驶领域的布局来看,其产品版图覆盖从ADAS到高阶智驾再到完全自动驾驶的所有级别,包括标准ADAS、云增强ADAS、SuperVision、Chauffeur以及Drive。
 其中,SuperVision、Chauffeur和 Drive是驱动Mobileye全自动驾驶愿景落地的三大核心智驾平台。SuperVision作为Mobileye最先进的辅助驾驶系统之一,已经在极氪、极星等品牌的车型上实现量产,能够提供“可脱手(Hands-off)”的驾驶体验,也就是国内常说的NOA。
其中,SuperVision、Chauffeur和 Drive是驱动Mobileye全自动驾驶愿景落地的三大核心智驾平台。SuperVision作为Mobileye最先进的辅助驾驶系统之一,已经在极氪、极星等品牌的车型上实现量产,能够提供“可脱手(Hands-off)”的驾驶体验,也就是国内常说的NOA。
而Chauffeur则通过激光雷达和4D成像雷达的融合,在特定运行设计域(ODD)内,实现 “可脱手(Hands-off)” 同时“可脱眼(Eyes-off)”的驾驶功能,预计将在2年内正式搭载于量产车型。 SuperVision系统与Chauffeur系统的同时推进,打造出了Mobileye不同于其他玩家的独有智能驾驶路线——双路径策略。
从不同智能驾驶路线中,能看出逻辑差异化。
Waymo走的是以高精确度为核心,采用重地图和区域限制的方式,扩展性较弱,成本高昂的路线;特斯拉则是以快速迭代和提升召回率为主,精确度仍需进一步提高,路径从以“低精确度高召回”逐步过渡到“高精确度”。
而Mobileye一方面通过第二代SuperVision系统同步提升精确度(安全性)和召回率(可用性);另一方面通过Chauffeur系统追求极致的精确度,先将ODD限制在高速,而后逐步扩展可用性。
这种方式既保证了技术的先进性,又兼顾了商业上的可行性和适应性。
此外,Mobileye的Drive系统瞄准了无人驾驶出租车和物流配送领域,展示了Mobileye在完全自动驾驶技术上的雄心。
Mobileye的4D成像雷达和EyeQ芯片也是展台的一大焦点。
其中,4D成像雷达对Mobileye实现真正冗余意义重大,而EyeQ系列芯片则以其高效的计算能力和低能耗设计为自动驾驶系统提供了强大的硬件支持。
Mobileye基于视觉感知的复合人工智能系统技术路线对更多传感器的采用持开放态度,不仅内部在开发成像雷达,还在“可脱眼”系统中集成了一个前向激光雷达。摄像头和雷达的成本都相对较低,“可脱眼"系统配置的一个前向激光雷达的成本也很低,只需几百美元。
EyeQ芯片独特之处在于芯片设计,采用了完全异构的计算架构。
这种架构的精妙之处在于,它能够根据卷积、Transformer 等不同神经网络以及视觉运算的多样化计算场景,将适合的运算任务精准地分配到与之适配的核上进行处理。
这么一来,在处理高清图像和复杂的深度学习算法时,相比上一代 EyeQ5H 芯片,EyeQ6H两倍的性能提升的同时,FPS(每秒能够处理的画面帧数)指标却提升了十倍。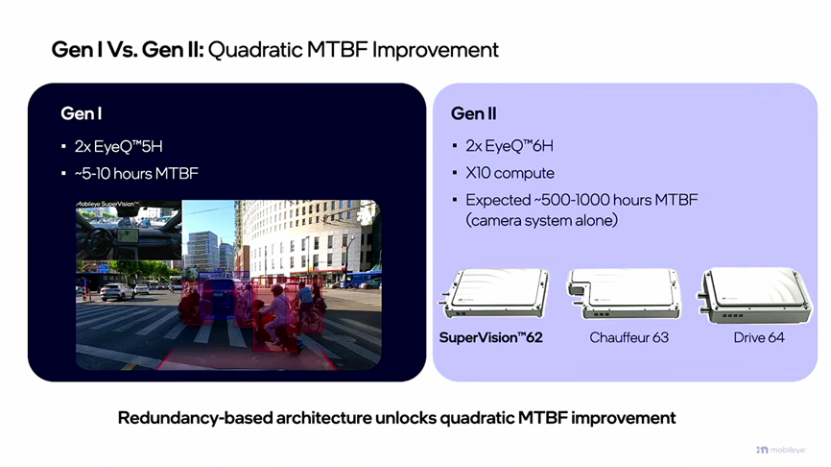 这意味EyeQ6H 芯片在实际运行过程中能够更快速、流畅地处理大量的图像数据和复杂的计算任务。
这意味EyeQ6H 芯片在实际运行过程中能够更快速、流畅地处理大量的图像数据和复杂的计算任务。
02.
端到端是Mobileye复合人工智能系统中重要的一部分
熟悉Mobileye的人都知道,它可以算是中外新势力发展智能驾驶的一位启蒙恩师。在特斯拉和小鹏第一代车型推出L2之际,其智驾系统采用的都是Mobileye芯片和视觉算法方案。
但令外界有所不知的是,Mobileye实际上很早就看到了当下火热的端到端的潜力,在其大规模流行之前,就开始研究其在智驾领域的应用,也有积极采用端到端。
早在2016年,Mobileye创始人、总裁兼首席执行官Amnon Shashua教授和Mobileye首席技术官Shai Shalev-Shwartz教授就发表了一篇阐释端到端系统的论文。
Mobileye对端到端系统的看法一针见血:认为端到端应作为智驾子系统之一提供冗余,而非独立运行。这是因为端到端系统存在一些固有的局限性,如难以处理系统内部错误、对无监督数据的依赖性,以及在实际驾驶中可能表现出的不符合交通规则的行为。
这种严谨的态度也是为何它布局端到端相较行业其他玩家更为稳重的原因。
如果仅依赖无监督数据,不引入抽象概念,不考虑长尾问题,而只是单纯地向系统提供更多数据,那么是否能够实现平均故障间隔时间的目标确实是一个值得探讨的问题。
为此,Mobileye 在其2024年Driving AI Day大会上介绍了基于视觉感知的复合人工智能系统技术路线,挑战大算力下的端到端大模型智能驾驶。
这套CAIS的核心在于,能够处理来自多种传感器(如摄像头、雷达、激光雷达等)的多模态数据,并结合专有的软件栈和高效的芯片,确保智能驾驶功能的高度安全可靠。与此同时,其可控的成本以及灵活的可扩展性,也是推动智驾乃至全自动驾驶大规模落地的重要因素。
简而言之,这就是Shashua教授在演讲中提到的精确度和召回率两个关键概念。在自动驾驶复杂的技术体系中,两者分别支撑着系统的安全性与可用性。
精确度,主要关乎自动驾驶系统的安全性能,以平均故障间隔时间(MTBF)作为重要衡量指标。它反映了系统在运行过程中保持稳定、避免故障或是事故发生的能力。一个高精确度的系统意味着在长时间的运行中,出现关键故障的频率极低。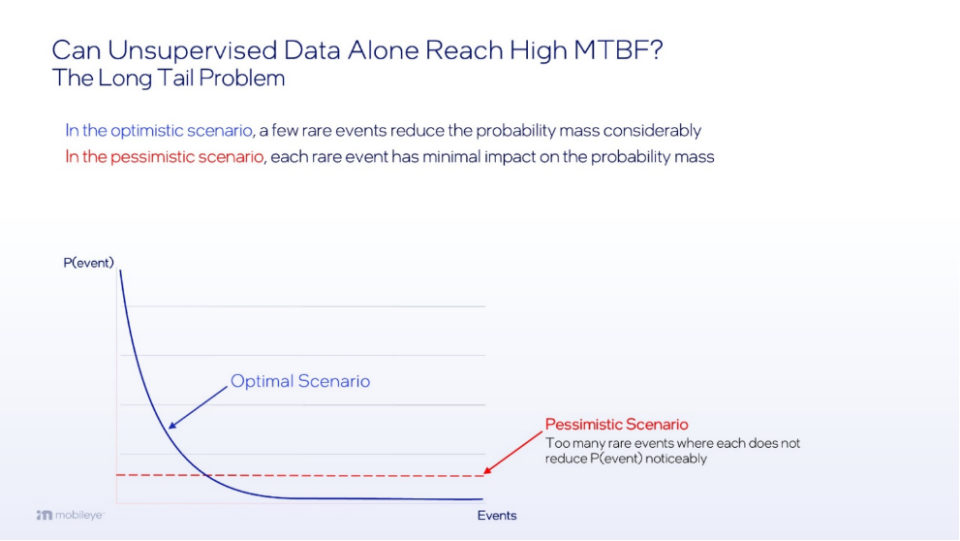 然而,Shashua 教授指出,设计一套足够安全的自动驾驶系统,仅仅依靠提高MTBF 是远远不够的,还需要有处理不合理风险(unseasonable risk)的能力。
然而,Shashua 教授指出,设计一套足够安全的自动驾驶系统,仅仅依靠提高MTBF 是远远不够的,还需要有处理不合理风险(unseasonable risk)的能力。
在现实场景中,即便碰到诸如婴儿躺在路上这类不合理却极度危险的状况,自动驾驶系统也必须像人类驾驶员一样迅速且正确地做出反应。
此外,如果驾驶员在驾驶过程中存在酒驾、分心驾驶等行为,就会使得统计数据存在偏差。而自动驾驶系统则不存在这些问题。
因此,直接拿两者的MTBF进行对比是不合理的。也就是说针对自动驾驶系统,应该有更高的安全标准。
而召回率则与系统的可用性紧密相连,其涵盖了ODD、地理可扩展性和成本等多个关键维度。 Shashua 教授在演讲中提到,ODD决定了系统所能适应的驾驶场景范围,包括不同的天气条件,各类道路类型,以及复杂多变的交通状况。地理可扩展性体现了系统在新地理区域部署时的适应能力,若系统能够在全球各地迅速投入使用,且无需进行大规模的重新校准工作,便能极大地提高其可用性。而成本因素,涵盖了硬件采购、后续维护和系统升级等各个环节,较低的成本能够使系统更易于普及,进而提升其在市场中的竞争力。例如,一辆能够在各种环境下稳定运行且成本合理的自动驾驶汽车,其召回率必然处于较高水平。
可以说,精确度和召回率之间存在着相互制约又相互促进的关系。
在一定程度上,提高精确度可能需要增加系统的复杂性和成本,这可能会对召回率产生影响;反之,过度追求召回率而忽视精确度,可能会导致系统出现安全隐患。
在自动驾驶技术的研发过程中,如何实现精确度和召回率的“双高”,是所有企业面临的关键挑战之一。
Mobileye在冗余系统设计方面的创新,可以说为整个自动驾驶行业的技术可靠性打开了一道可窥探的门。 在Mobileye提出的安全架构下,有四类错误需要规避和应对,即规划类错误(planning),可复制型错误(reproducible errors),可识别型错误(identifiable errors),以及“黑天鹅”事件(black swans)。而冗余系统对于处理后两类错误至关重要。
在Mobileye提出的安全架构下,有四类错误需要规避和应对,即规划类错误(planning),可复制型错误(reproducible errors),可识别型错误(identifiable errors),以及“黑天鹅”事件(black swans)。而冗余系统对于处理后两类错误至关重要。
Shashua 教授举了一个硬件冗余的典型应用案例:Mobileye Chauffeur系统采用双电路板设计,一个电路板配备2颗EyeQ6H芯片,另一个电路板配备1颗EyeQ6H芯片。两个电路板互为冗余的设计,确保在一个电路板故障时,另一个仍能接管车辆控制,实现安全驾驶。
Mobileye在CES上展示的一个案例是,通过11 个摄像头(7 个长距摄像头和 4 个泊车摄像头)采集的像素信息输入到Transformer,实现从图像到控制指令输出的端到端过程。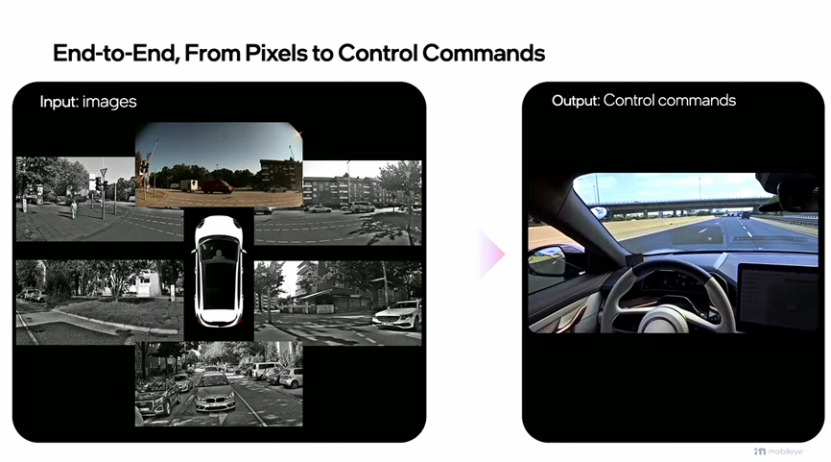 此外,在Vidar(视觉激光雷达)的案例中,从摄像头这端输入的信息,经由特殊AI模型的处理,可直接输出类似激光雷达的 3D 感知结果。
此外,在Vidar(视觉激光雷达)的案例中,从摄像头这端输入的信息,经由特殊AI模型的处理,可直接输出类似激光雷达的 3D 感知结果。
在实际驾驶中,比如在复杂的路口或有障碍物的场景下,仅依靠外观图像可能会误判物体的距离和位置,但 Vidar 能提供准确的 3D 信息,与传统的基于外观的图像查看方式形成冗余。
从成本层面解读,与那些依赖大量昂贵传感设备和复杂架构的自动驾驶方案相比,Mobileye的复合人工智能系统的确实现了对成本的有效控制。
这意味着,大规模量产可转化为车企实打实的成本优势竞争力。正如Mobileye愿景:使得更多的汽车制造商能够在不同车型上采用自动驾驶技术,从而加速自动驾驶技术在市场上的普及速度。
不断演进的算法架构、从独立模型过渡到难度大的多任务学习、从传感器数据后融合到前融合,新一轮自动驾驶产业革命已经开启,自动驾驶也正在从以技术竞争为主的上半场迈向商业化落地的下半场。Mobileye在与中国本土厂商一同经历了上半场之后,在深度内卷的高阶智驾大战中也在调整着自己的节奏并通过技术创新实现成本优势。
03.
写到最后:中国车企需要怎样的合作伙伴?
在2024年的一场行业论坛上,Mobileye中国区董事总经理路以理(Elie Luskin)在回应智驾网的提问“为什么Mobileye SuperVision平台选择在中国首发”时表示,这当然是Mobileye对中国市场的看重,但更重要的是,如何以安全的智驾方案助力中国新能源汽车产业走出去。
随着中国市场从增量市场向存量市场的转变,出海正为中国车企走出内卷的答案,中汽协数据显示,2024年中国汽车出口585.9万辆,同比增长19.3% 。
伴随而来的是智驾如何出海?如何应对国际市场动态及时局的不确定性?
这些需求正赋予Mobileye与中国汽车制造商合作的新广泛领域。

推荐
16.99万元起,一汽-大众迈腾PHEV、探岳L PHEV重磅上市
私家车探
坐拥冠军底盘基因 东风雪铁龙天逸C5 AIRCROSS
畅游车世界
零跑D99重磅上市:24.98万起售,全域自研打造宜商宜家全能旗舰MPV
汽车简报
逆势涨价?腾势N8L 坚定上攻
车壹条
9.99万元起,十万级特特特好开城市NOA。东风奕派纳米06智趣版上市
知行动力
比亚迪荣膺可持续发展国际大奖,闪充赋能马可波罗新丝路
畅游车世界
一汽-大众双PHEV重磅上市,五大黄金标准交出实测硬核答卷
马拉车市
零跑D99上市:24.98万起售,全域自研打造宜商宜家全能旗舰MPV
车市谈
上汽大众,让谁睡不着觉?
汽车K线
三大汽车央企重组整合将迎第二季
汽车K线
阿维塔07L官宣全新“弦月银”车漆,月光灵感演绎新豪华!
车视轮谈全新丰田亚洲龙曝光!外形向凯美瑞靠拢,量产后又能大卖?
优视汽车评论
暂无评论,抢占沙发









